








TWINSA
In-situ Calibration
In-Situ Dual Calibration System (lDCS) principle: Calibrate sensors and equations independently.
Based on our understanding of the nature of force measurement, a critical question arises: Can we address these challenges by separating sensor calibration from equation calibration, allowing both to be handled independently without the need to remove load-bearing components from the structure? Furthermore, the calibration process should not interfere with the current load conditions of either the components themselves or the structure as a whole.
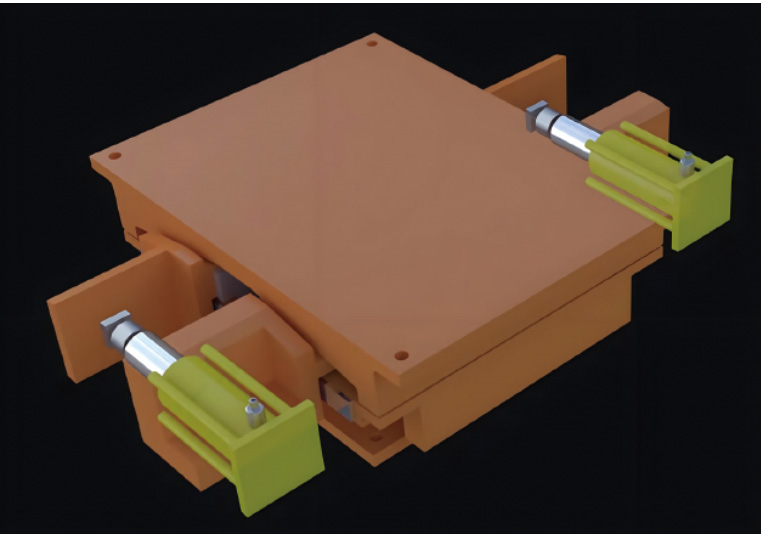
Smart Adapters facilitate sensor and equation calibration in one mechanical process as follows:
Sensor replacement & calibration:
The actuation device pushes the wedges outward, provides space to replace and calibrate the load cells without affecting the structure's load- bearing condition.
Friction reversal:
As the wedge continues to push, friction initially decreases to zero and then gradually increases in the opposite direction. Eventually, it reaches a friction reversal state, where the friction coefficient matches the previous magnitude but in the opposite direction.Throughout this process, system height is maintained within a 0.05 mm variation.
Equation Calibration:
During the friction reversal state, the recorded actuation force is used in a two-variable equation with applied force and the friction coefficient, enabling precise calculations.
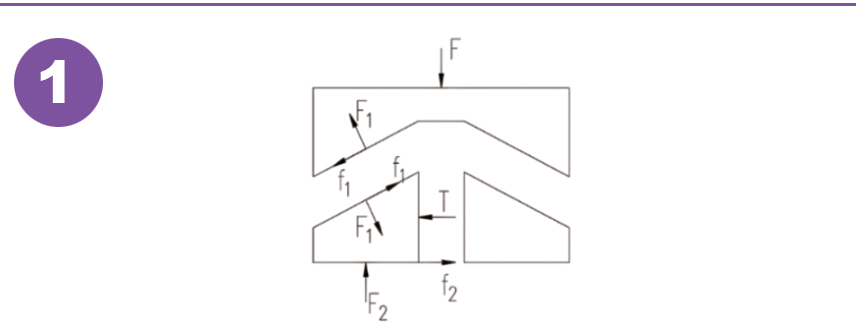
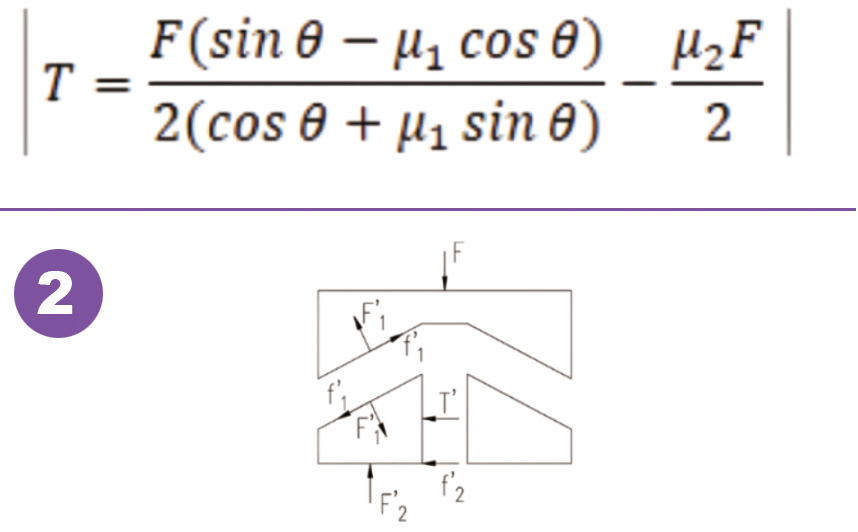
During monitoring, the load to be measured is decomposed into horizontal components, which are captured by the passive sensor after overcoming friction. The F-T relationship as below.
During in-situ calibration, The hydraulic jack pushes the wedges aside to reach friction reverse state, the F-Tâ€Equation is then below.
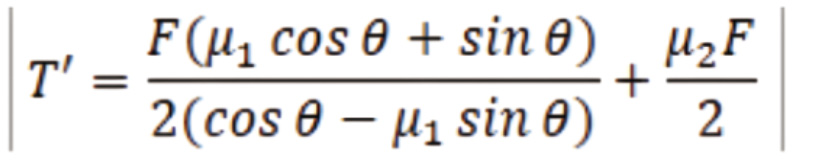
F:Force applied.
T: The load cell reading.
T' the force exerted by actuator.